2009Spring
3D Scene Reconstruction by Stereo Imaging
Karthik Malasani
Images and or video as we traditionally know them are 2 dimensional representations of 3D real world. In the process of imaging, depth information corresponding to a scene is lost. However, when there is extra information in the form of stereo view of the scene or video of the scene with overlap between frames or significant amount of other information like camera parameters and location of camera, it is possible to reconstruct the 3D real world scene to a great degree of precision.
3D scene reconstruction offers a great deal of opportunities in fields like urban modeling, biology, archeology and so on.
In this project I have explored reconstruction of 3D scene from images/video captured using an uncalibrated camera and without the knowledge of camera location.
The process of reconstruction of scene as in this project, typically involves these steps[1]:
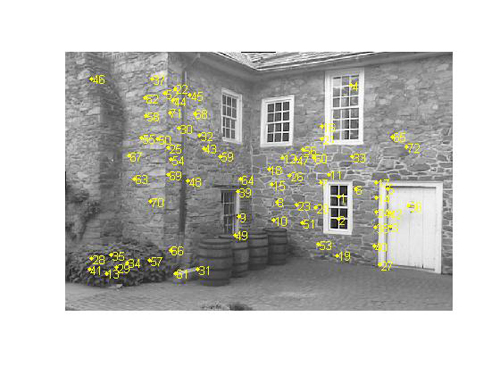
1. Epipolar Geometry Estimation
2. Self Calibration
3. Structure Estimation & Refinement
4. Euclidean Upgrade of structure
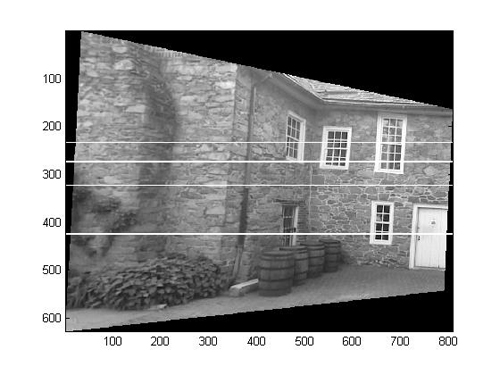
5. Image Rectification
6. Dense matching using epipolar constraint.
7. Surface Modeling
8. Texture mapping
1. Multiple view geometry in computer vision by Richard Hartley, Andrew Zisserman
2. http://www.cs.unc.edu/~marc/tutorial/node3.html