2016 Fall
Dan Wang & Mengyu Chen
Dan Wang & Mengyu Chen
MAT594GL Autonomous Mobile Camera/Drone Interaction
Apparatus of Inspection
Apparatus of Inspection
Project Concept
The goal of our project is to build an “apparatus of inspection”, following the idea of real-time image recording, surveilling, and monitoring in the functionality of the robot-drone system. The current system implemented for robots and drones require a central workstation to be placed in the center of the performance space, as well as an array of eight distance sensors to collect and update location data from the environment. The device we built in this project coordinates this central communication system by providing a carefully designed inner structure to accommodate all the electronic and computational components, and aesthetically functions as an agent for both visual inspection and conceptual mediation.
Project Details
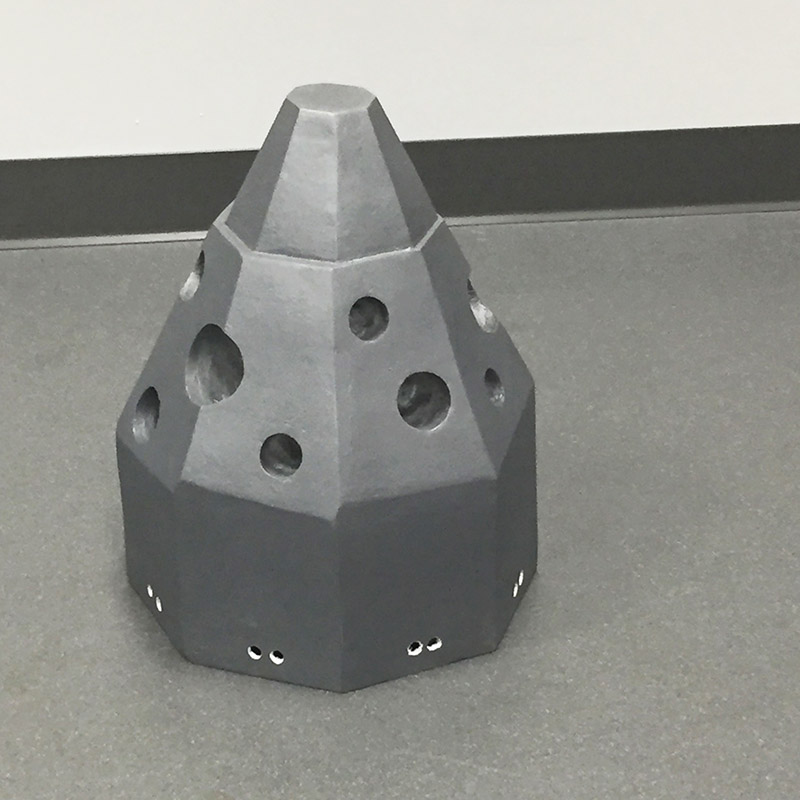
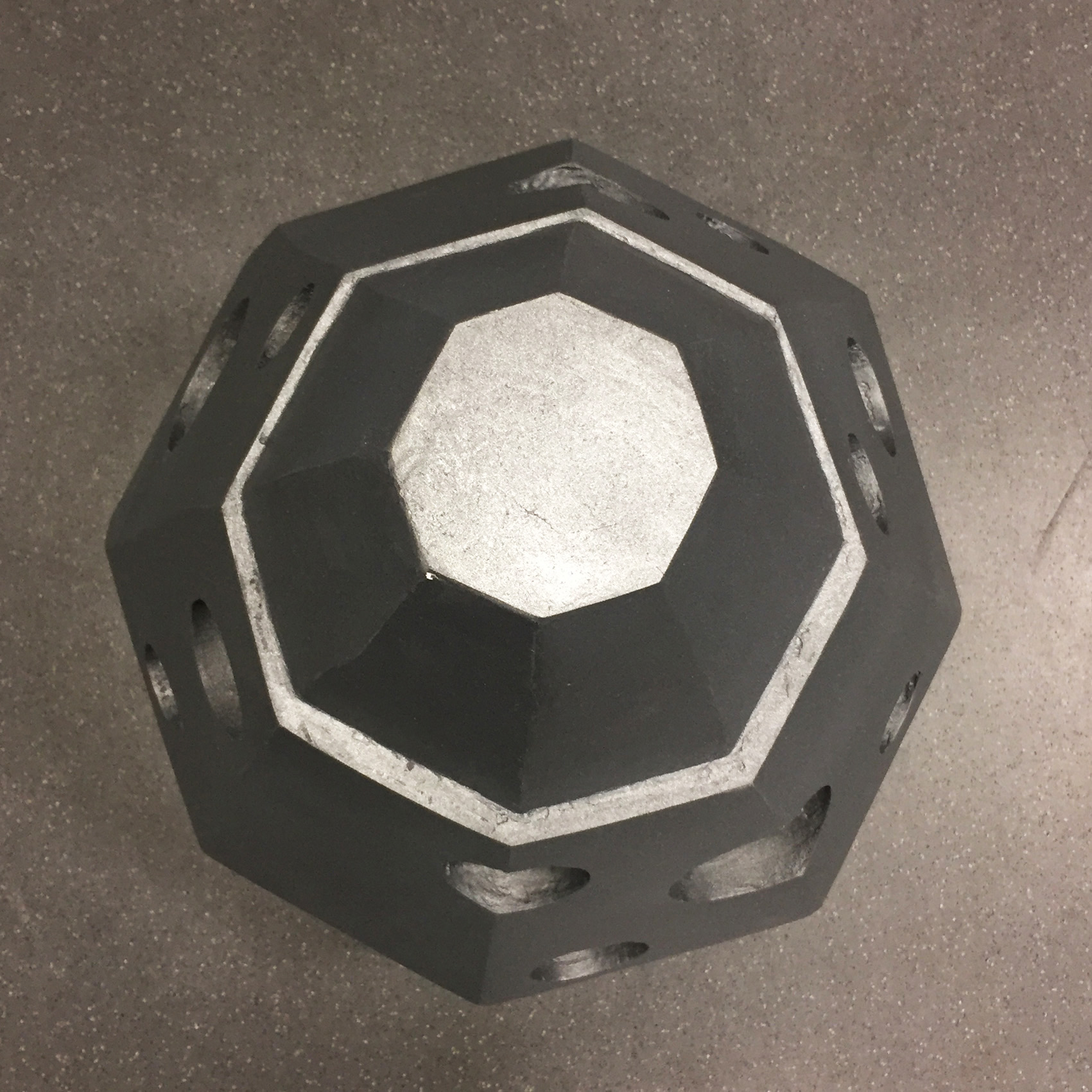
In order to accommodate all the sensors, wires, wifi-router, micro-controller and a mac mini computer inside our device, we initialized the design of our sculptural piece as an “octagonal bunker” which has a 360 degree field of view ability with eight distance sensors simultaneously projecting ultrasonic waves to its environment. While constantly “inspecting” and “surveilling” its surrounding objects, the sculpture itself also becomes the target and the subject of inspection being recorded by the cameras of robots and drones. That is, the robots, drones, and the sculpture are always seeing each other, recording and exchanging their inspection data via the communication system placed inside the sculpture. This bilateral relationship of “seeing” and “being seen” existing in this autonomous system particularly gets more evolved when the audience is present, as audience as a third party can also join or be forced to join this relationship by seeing and being seen by the system.
Following this notion of interactive or inter-relational inspection, we further conceptualized this sculptural piece as a futuristic version of “Tai-hu Stone”, a type of naturally formed geometric stones full of pores and holes usually placed in Chinese traditional gardens for inspection. In the context of Chinese gardening, the Tai-hu Stone not only occupies the space as an object of viewing, but also reconciles all the human artifacts in the space with the natural environment, for its ambiguous form in between organic and artificial. The presence of such a stone mediates the relationship between human and nature, providing a neutral and aesthetic space for meditation.
The form of our sculpture succeeds this ambiguous form of Tai-hu Stone and is intended to reconcile the form of the control system with other robots and drones. It is built into a geometric shape with stable base like a machine station, and at the same time it has holes and poles on its surface that simulate the cameras or the “eyes” of robots. May it not be able to move, the sculptural device does have a form of robot and may be further modified and transformed into a functional one.
Following this notion of interactive or inter-relational inspection, we further conceptualized this sculptural piece as a futuristic version of “Tai-hu Stone”, a type of naturally formed geometric stones full of pores and holes usually placed in Chinese traditional gardens for inspection. In the context of Chinese gardening, the Tai-hu Stone not only occupies the space as an object of viewing, but also reconciles all the human artifacts in the space with the natural environment, for its ambiguous form in between organic and artificial. The presence of such a stone mediates the relationship between human and nature, providing a neutral and aesthetic space for meditation.
The form of our sculpture succeeds this ambiguous form of Tai-hu Stone and is intended to reconcile the form of the control system with other robots and drones. It is built into a geometric shape with stable base like a machine station, and at the same time it has holes and poles on its surface that simulate the cameras or the “eyes” of robots. May it not be able to move, the sculptural device does have a form of robot and may be further modified and transformed into a functional one.
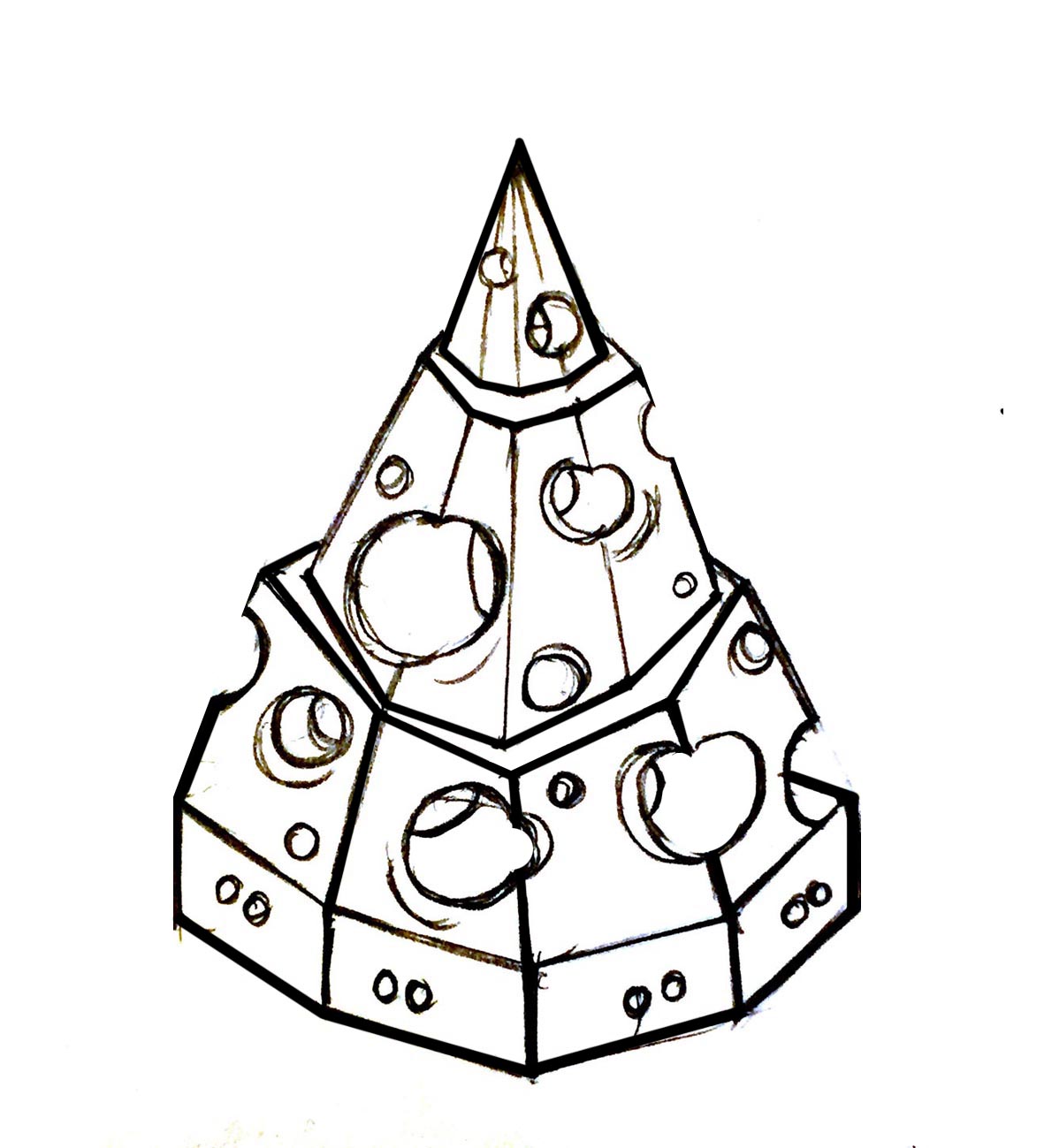
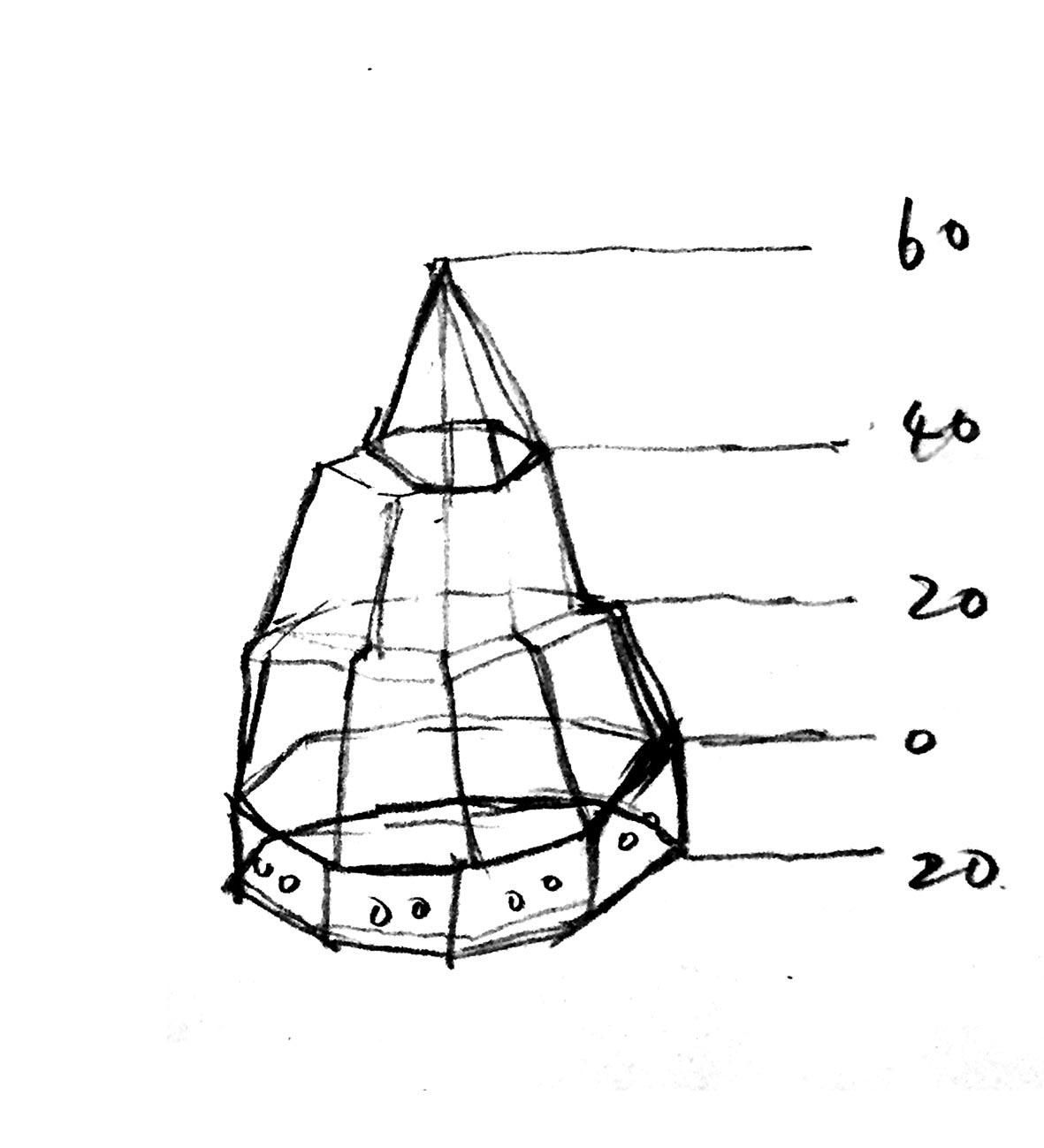
Doodles/Skeches
Technical Details
Materials: Polystyrene foam, acrylic modeling gesso, spray paint
Technique: foam cutting, sculpting, sanding, plastic coating, painting
Technique: foam cutting, sculpting, sanding, plastic coating, painting
Many Screen Shots