Jieliang (Rodger) Luo, PhD MAT (2020)
Advisor: George Legrady
In collaboration with 18 students in the Art 185 course, Spring 2017
Presented at the 2017 MAT End of Year Show
Since the birth of the first photograph taken by Joseph Nicéphore Niépce in 1827, photography has been generally considered as an individual activity, not too much collaboration involved. With the advent of computational photography, which involves the collecting of data prior and during the photo-taking phase, artists have increasingly begun to explore the potential of swarms of data from images or sensors to acquire much richer visual information and generate images with compelling visual results.
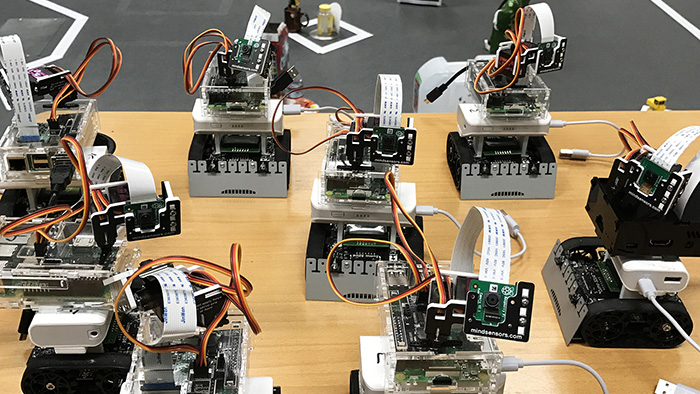
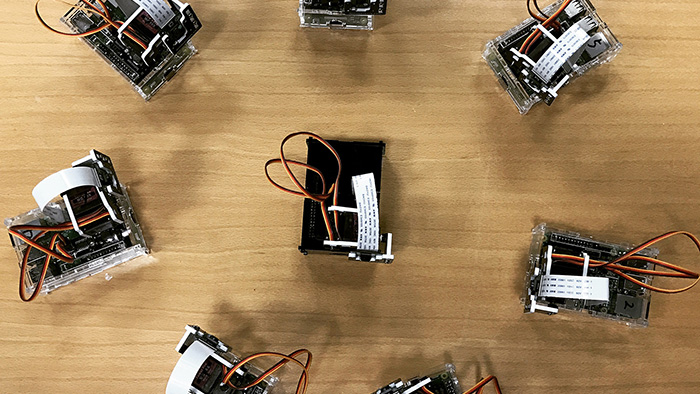
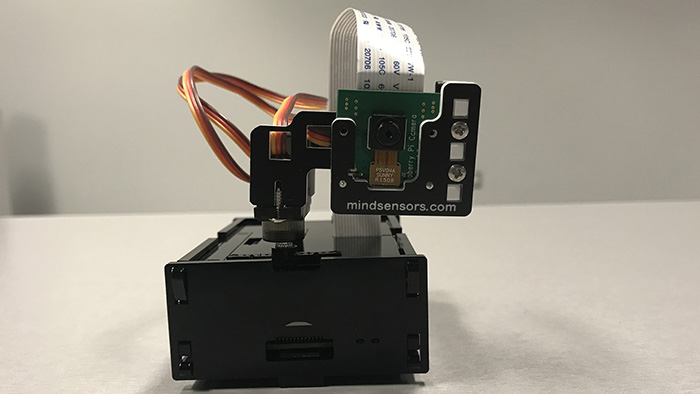
This project is a preliminary research on computational collaborations through the image-capture activities of 8 autonomously active cameras, each attached to a Zumo 32U4 moving robot. Each robot moves in a restricted area populated by irregularly placed objects, many of which have visual representations of faces. The robots’ tasks are to find faces, and once they find one, they take a picture of that face and send the image to a server from which the images are then retrieved and featured in a 3D virtual environment viewed on a large projection. Each of the robots’ movements are controlled by an Arduino, each unit programmed to perform in different ways when they approach an object or a face.